The Explodomatic
…an irreverent name for a thought experiment turned reality!
While discussing the work with my dad on my first high-powered, Level 2 rocket, and the cost associated with it, an interesting question began to form – what would be possible, in terms of maximum apogee and minimum cost, with an “off the shelf,” readily available model rocket engine?
Limiting the project to a model rocket engine meant no larger than a “G” motor. Inexpensive and readily available would limit the project to an “F” motor (available locally for less than $6 each). With that in mind, I began considering what would be possible. G and F motors would require at least a 29 mm motor tube, so the obvious choice was to make this a minimum diameter 29 mm rocket.
In order to keep costs down and assembly quick and easy, a relatively inexpensive body tube, “blue tube,” was chosen. I also decided that balsa wood fins would be sufficient for this project.
After researching readily available nose cones, I decided that the best option would be to 3-D print my own. The other nose cones that were available did not have the profile I was looking for based on my calculations of the expected flight conditions and were considerably more expensive.
After sourcing everything necessary, my rough estimate was that the airframe could be manufactured for about $5, keeping the cost of the airframe below the cost of the motor. This was important as it would allow for easy iterations and inexpensive experimentation. The initial goal was to achieve an apogee over one mile in height and a speed exceeding Mach 1.
After numerous hours of experimentation using OpenRocket (open source rocket modeling and flight simulation software) tweaking all of the available variables such as fin design and location, body length, engine location, nose cone design, etc., I came upon a design that looked like it would meet the initial goals.
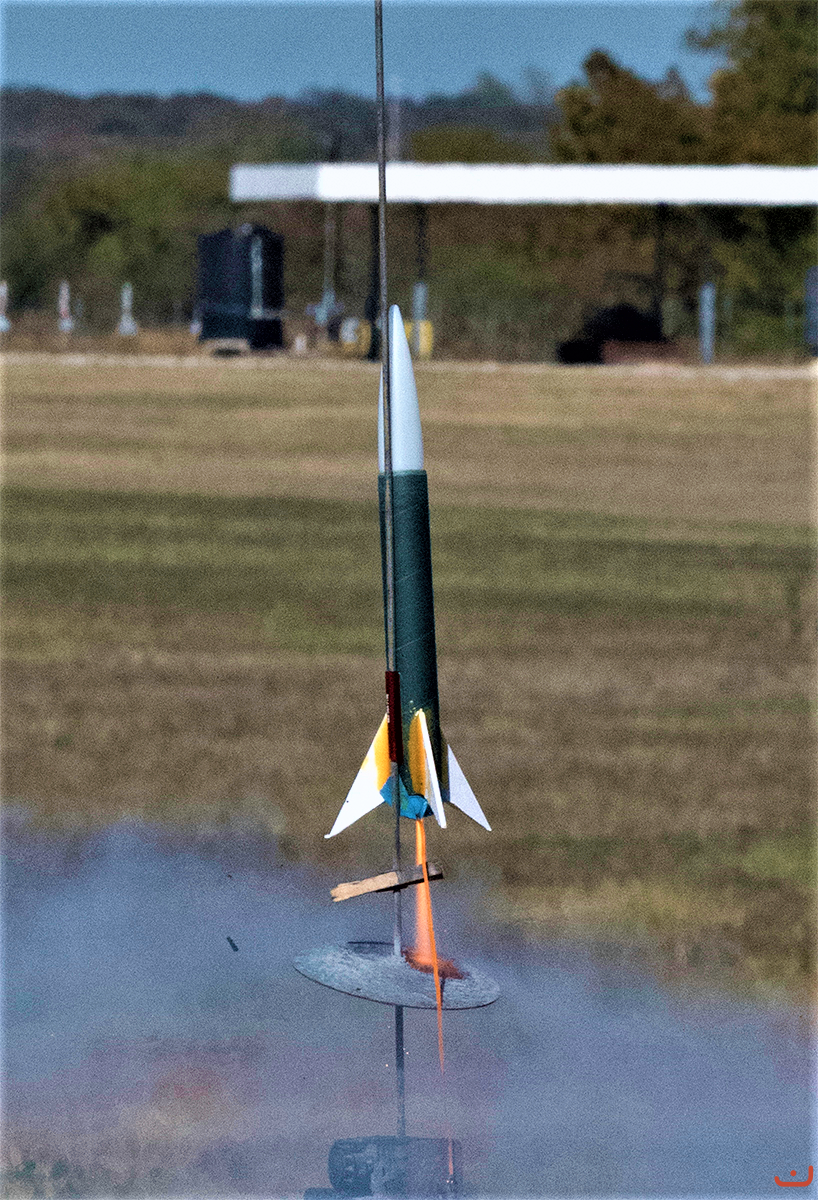
I then ordered the necessary raw materials and built the first iteration. Shortly thereafter, I flew the first iteration with an F engine at a Tripoli Houston launch in Hearne, TX. The ascent went off without incident, however I lost sight of the rocket during the descent and was unable to retrieve it.
The second iteration was launched a month later. This one was equipped with a GPS-based altimeter with radio telemetry capabilities. While this launch was not as successful as the original (an issue with one of the fins caused it to spin which reduced maximum altitude), we were able to retrieve the rocket as a result of the telemetry received. Unfortunately, the rocket was caught in a tree 30 feet above ground and took two days to retrieve. Once we finally had it, and plugged the altimeter in to download the full flight data, the USB connector broke off of the altimeter taking the solder traces with it. I then had to send it back to the manufacturer for repair. After it was repaired, I finally got the full flight data off of the altimeter and found out that the maximum altitude achieved was 4200 feet (1000 feet short of our goal), and the maximum speed achieved was Mach 0.9. It was a good try. I believe that if not for the fin issue, it would have achieved the initial goal.
I was hoping to make another attempt with a G motor, but Tripoli Houston changed their launch requirements for rockets going over 5000 feet to require a dual-deploy retrieval system. This means redesigning the rocket to hold an electronics bay, and an extra parachute, which will make it much heavier and much longer. As this could increase the cost of the rocket to hundreds of dollars, cost requirements would necessitate redundant systems, further increasing the mass. With the rocket over ten times as massive and a hundred times as expensive as before, it was now not cost-effective to continue the original project. As such, a new project, relating to altimeter redundancy and reliability, has been undertaken.